Line follower code nxt robot using atmega16
He is a Firmware Engineer, techie, and a movie-buff. Programming a Line Follower Robot Jun There are a lot of possible difficulties that can be set up for you in a contest. Do the same thing with the right turn logic. Some of them even have inversion in logic you will be asked to follow white line on black background all of a sudden:
The center sensor along with either of the two side sensors will read LOW. All the three sensors will be placed in the front side of the robot and all will be pointing downward. This is given to the comparator to compare with a reference signal generated by the potentiometer. All cannot be discussed here. Programming a Line Follower Robot Jun
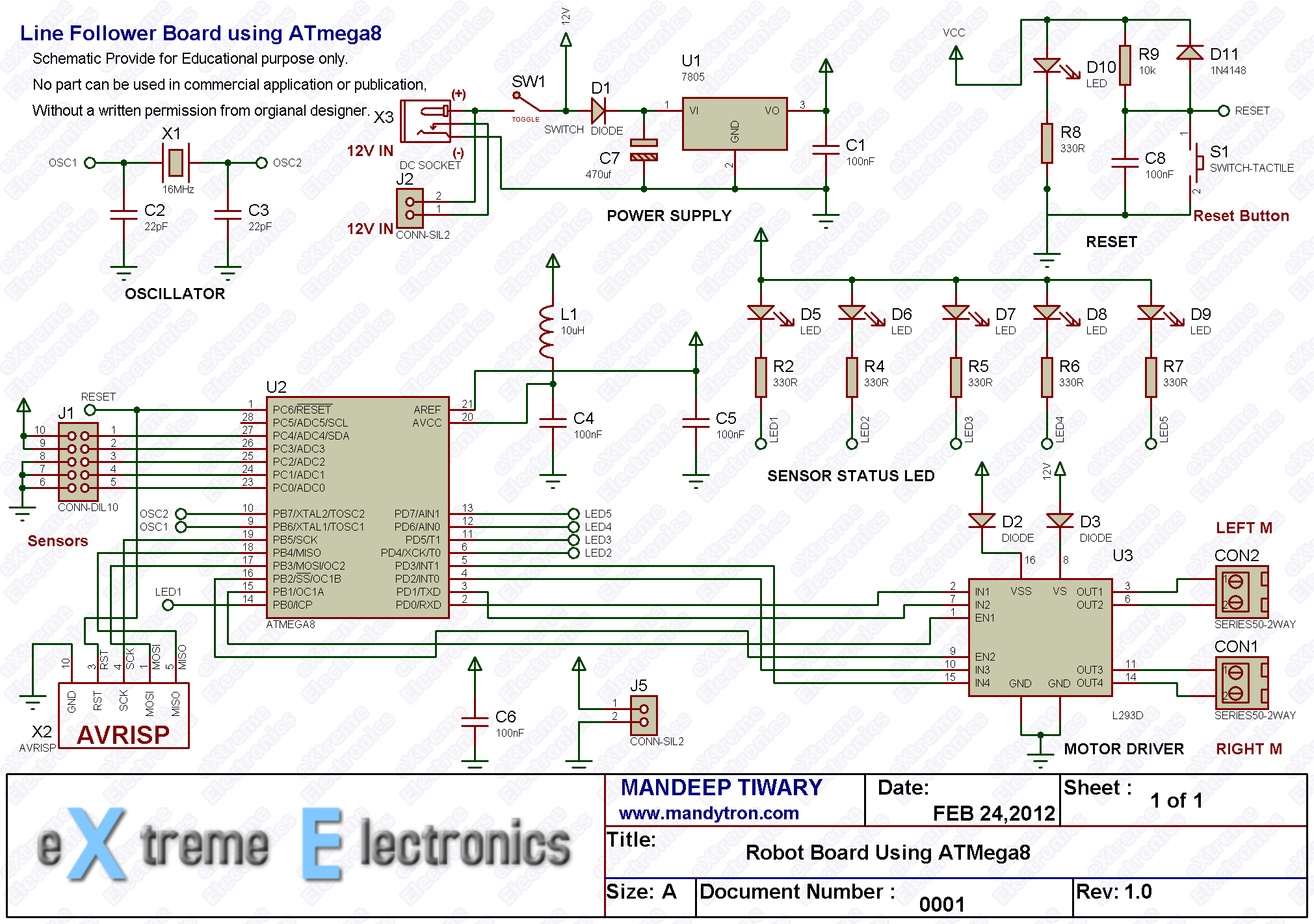
Back to the post, you have to place the bot over the line and see what it line follower code nxt robot using atmega16 for various position of the line. For this, we will use the ADC of the ATmega16 microcontroller to convert the analog signals to digital values. Back to the post, you have to place the bot over the line and see what it reads for various position of the line. Generally, the line is of black color on white surface or white line on black surface.
The robot automatically follows a line without any deviation from the line. Again was a trade-off between the look and the feature, I choose the feature. Now you have to define two kinds of left turns. But the outputs of the three analog IR sensors are analog in nature, so these signals cannot be processed directly by the microcontroller. The IR emitter emits a constant IR beam.

This will help you test your code then and there. With the calibration values at hand, you can start programming your robot. This made my board look really bad. The white surface reflects most of the beam while the black surface absorbs most of the beam.