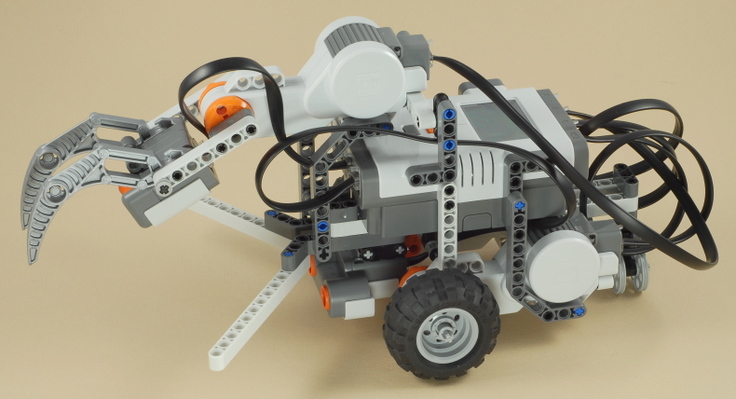
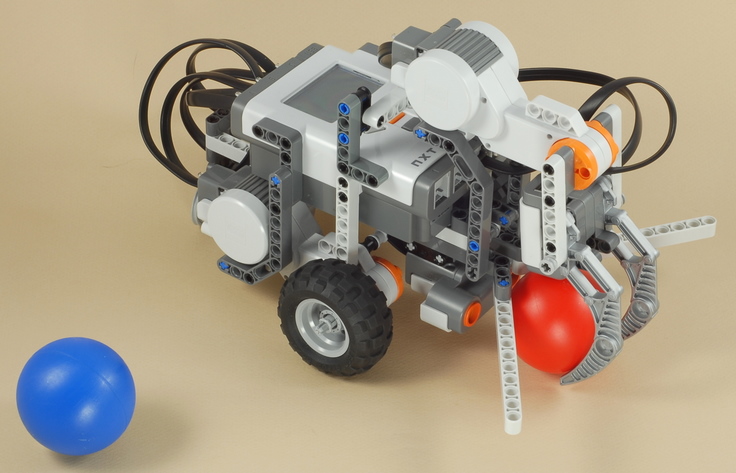
How to make a nxt robot pick up a ball

The 4 balls can be any combination of the small golf balls or larger wiffle balls. We appreciate any feedback you have! The following two pictures show the robot approaching the station and then on top of it. So it we apply too little power, the robot gets stuck in curves. The robot has a lot of inertia, but the wheels that are connected to the train motor do not have a lot of traction.

When the NXT breaks the wheels, the robot just keeps slipping along the track. But what opened the brick up to whole new vistas of innovation and functionality was the development of the open source leJOS environment. Plus, it has to remember its position, so that it knows how to get back to the starting point.
So it we apply too little power, the robot gets stuck in curves. The system recognizes commands, vocalizes activities, and visually interprets dealt hands. The brick was initially designed by LEGO to be programmed via a PC-based system that allows the visual assembly of on-screen functional components. Newer links Some links to existing program development sites include: LocoArm is able to detect both of them, and to approach them from either side.

Copyright Robomatter, Inc. Also, be on the lookout for future updates on our blog. The system recognizes commands, vocalizes activities, and visually interprets dealt hands.
Newer links Some links to existing program development sites include: You can see them in the picture below. But leJOS is obviously not a complete implementation of the Java platform. And UC Berkeley developed the winning entry, the "PaperBot," a robot that selected and sorted paper by color.

The RCX version 2. Manufactured with intellectual properties from Carnegie Mellon Robotics Academy. When it fails to grab the ball, it's usually because it didn't stop with the light sensor just above the black tiles but a bit earlier. The system recognizes commands, vocalizes activities, and visually interprets dealt hands.