How to build a nxt robot claw
In each of these events students produced some spectacular Robots this year. Hopefully these images will be an inspiration to future students. Primary Robots have to navigate around the Rescue course, and push the "person" can out of the green "quicksand". Unlike how to build a nxt robot claw Secondary Robots, they do not have to have control of the can, so do not need a can-grasping mechanism. Students constantly modify their robots during the competition - I'm guessing that this is the reason for the unconnected cable in the image above.
I'm guessing that the touch sensor on this neat compact Robot could act as a convenient start switch? Three neat robots that use two motors and two light sensor to follow the line, plus an omnidirectional rear wheel.
Both Robots used all four sensor ports, and two of the three motor ports. The RoboCup Junior Secondary Robots have a similar Challenge to the Primary Robots, with the exception that they should "have control" of the "person" can when they leave the green "quicksand".
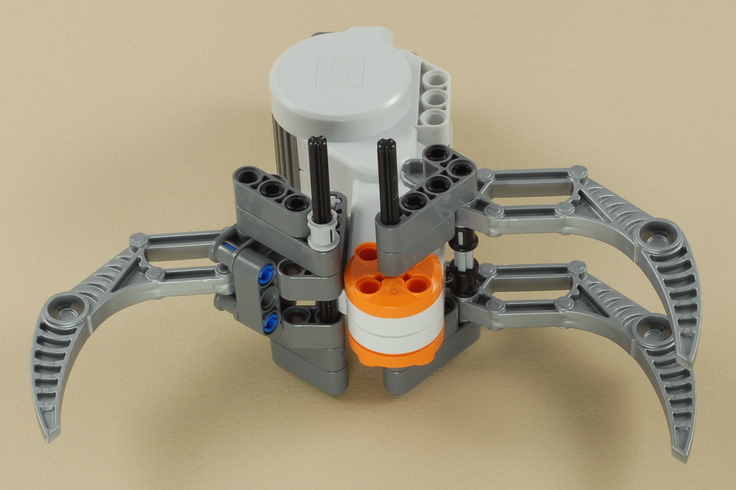
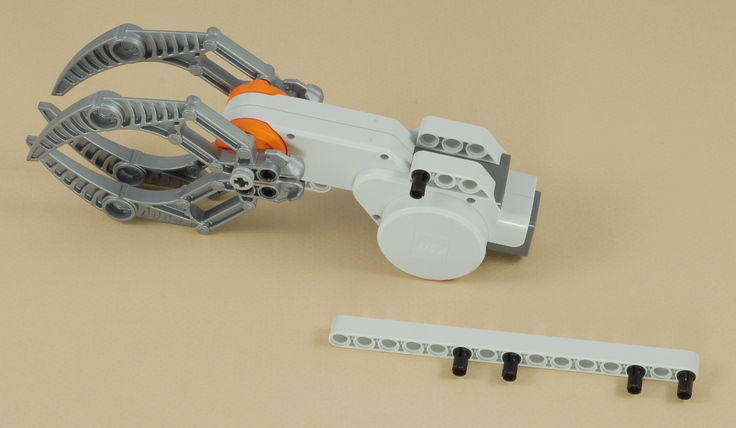
You will see that there are a variety of ingenious ways that students have used to solve this Challenge. This EV3 Robot can not only "control" a can, it could lift it as well, making it eligible for use in the "Open Rescue" competition. This Robot uses two geared arms that move in a "pincer" movement to control a can. This Robot uses four geared arms that move in a "pincer" movement to control a can.
The use of more than two arms would how to build a nxt robot claw that theoretically the can is more likely to remain upright. Each of the two Robots above aim to control the can using two fixed angled arms.
I'm puzzled about this Robot. There is a geared mechanism that is connected to the front of the Robot, but I can't be sure how it would work. This was a particularly neat solution to controlling the can. When I first saw it, I did not believe it could control the can - but it proved me wrong by slipping those two prongs underneath and either side of the can. It lifted the can off the mat quite easily, and carried it out of the quicksand.
A very neat design by this student. Do these control mechanisms actually work? Here are some examples. The can has been captured by two arms! It is at a bit of an angle, but that does not matter as in Secondary Rescue the can only has to be moved out of the green "quicksand" in a controlled fashion - the control does not have to be neat! Here is a Robot that plans to use four arms to attempt to "control" the can.
The can has been grasped, and is held beautifully upright. The Robot almost has the can out of the green "quicksand", and will score well with this manoeuver.
Here a Robot is approaching the can. You can see a gyro sensor mounted between the twin-EV3 computer bricks. I suspect that this could be used to keep account of the direction of the silver strip through which the Robot is supposed to exit the green "quicksand".
One very puzzling thing about this Robot is that it has no protruding claws or prongs! How can it possibly expect to gain control of how to build a nxt robot claw can? My jaw dropped when I saw this. This young girl student has produced the neatest mechanism I have ever seen for controlling the can at this level of competition. Brilliantly simple and wonderfully effective! Her Robot was also the only one I saw that used twin computer bricks. I made a how to build a nxt robot claw genuflect to girl power!
If your Robot goes in to the center of the green "quicksand", and then attempts to find the can by slowly rotating while it uses an ultrasonic sensor to find the can, it is theoretically possible to use one fixed and one moveable arm to control a can. I'm guessing that this is the strategy used by this Robot. Well, the strategy may have worked - I took this image too soon to see if the can was successfully controlled by this Robot - but it does look promising.
This tracked Robot has its two can-catching arms neatly folded so they do not catch on the "water tower" bottle or the orange arch that checks the size of the competing robots. By contrast, this Robot has its two arms permanently partially extended. Both the Robots above have decided that one arm for can control is quite sufficient.
Some Robots use different sensors, note the colors of the light from the two downward-facing sensors. Here is an example of a two-arm can control mechanism, both closed and open.
In this case the Robot demonstrates three arms, closed and open. The use of more than two arms increases the probability that the can will be held cleanly in an upright un-tilted position. This Robot does not appear to have any of the usual line-following sensors.
There are instructions on the Internet showing how to combine an Android Smartphone with an NXT computer brick to follow a line using video from the smartphone. I'm guessing that this Robot is working this way - if so, it is a very advanced Robot and enormous plaudits are due to the student who managed to get this Robot actually working - it would not have been simple to implement! This wooden-framed robot used an Arduino processor - the hand gives an idea of how to build a nxt robot claw.
The unusual side-mounted ultrasonic sensor may perhaps be used to judge the distance when rounding the "water tower" bottle. In the "Open Rescue" competition the Robots need to be able to lift the can and place it safely on the orange block, and then leave the same way that they came in.
The use of "half-wheels" to lift the can was one of the most popular approaches. These images show the entire "victim rescue" process. The Robot approaches the "victim in distress" canpicks the victim up, carries the victim to a platform that is raised above the quicksand, and safely places the victim on the raised platform. The Robot then leaves the quicksand at the same point that it came in. This Robot employs a motor actually within a claw assembly that can be raised and lowered by another motor.
The EV3 robots have the advantage of having four motor ports in their computer brick, versus three in the NXT computer brick. This allows the use of two motors to steer the robot, and two motors to handle the claws. The four-arm claw assembly keeps the can nicely vertical when placed on the pedestal, and the Robot exits the green quicksand at the same place it entered - good work!
Again a motor is used within the claw assembly, which is raised and lowered by a rope from a crane jib. The can capture assembly is quite wide, and you will notice that the claws are closed when nearing the "water tower" bottle to ensure there is sufficient room to pass this obstacle. This Robot only just cleared the ceiling of the double-height "tunnel" when it was tackling an advanced course. I imagine there would be problems if the course contained a single-height "tunnel".
The difficult "gridlock" can be seen under this Robot as it leaves the "tunnel". Placing the computer brick at the back of the Robot leaves plenty of room for the can-grasping mechanism, without making the Robot so high that it will potentially hit the ceiling when the course becomes a "tunnel". This complete claw assembly including motor can how to build a nxt robot claw lowered and raised by the use of gears.
It was very effective in grasping the can. It also uses a "fork-lift" type of can capture very effectively. This Robot uses two arms to grasp the can.
As you can see, with two arms it is often difficult to grasp the can, as the can often slips into an awkward angle. In this case the student would probably have had his heart in his mouth as the can fell over on the raised platform, but the can did not roll off, and due to the rice weight in the base of the can, the can stayed balanced on the platform even though it looks as if it should fall off at any moment.
If it stays on the platform, the robot gets the marks. This was one of the few Robots with tank treads instead of wheels. This Robot uses a fork-lift-like winching system to lift how to build a nxt robot claw entire "can grasping" mechanism. A motor how to build a nxt robot claw the top of the tower uses a rope to how to build a nxt robot claw the can gripper assembly and hopefully the can to a sufficient height for the can to be placed on the pedestal.
This tower seems tall, and I did not how to build a nxt robot claw if it caused problems if the Robot had to go through a tunnel in one of the more advanced courses. This Robot used two ultrasonic sensors. After the can was grasped, this ultrasonic sensor would probably be blocked, and the second ultrasonic sensor could then perhaps I'm guessing be used to locate the pedestal where the how to build a nxt robot claw was to be placed.
You may also notice that this Robot does not have an omnidirectional rear wheel, a simple skid being sufficient. There are some mornings when you wake up, feel good, and think that everything is how to build a nxt robot claw to go your way today, and it does Another solidly-built Robot with a successful "half-wheel" can capture mechanism.
Note that the "half-wheels" are turned inwards during travel around the course, to help ensure there is less chance of bumping in to obstacles like the water tower. Another half-wheel robot, but in this case the can-lifting mechanism is on the back of the Robot.
The yellow cylinder is an air-controlled linear actuator. The white cylinder at the upper back of the Robot is a high-pressure air reservoir - there is also another on the other side of the Robot, although it is difficult to see in this image. The dial at the rear of the Robot is an air-pressure gauge that probably shows the pressure left in the two air reservoirs.
This Robot uses a thin metal shim to slip under the can, and carry it to the pedestal. The platform holding the shim is kept upright by a jib incorporating a beautiful parallelogram linkage - good design! As you can see, this seemingly unlikely mechanism has worked very nicely.
One of the problems in the Open Rescue category is to make the victim-rescuing can-lifting mechanism reliable. Usually the type of two-arm twin-half-wheel mechanism used in this Robot is reliable and will how to build a nxt robot claw the can cleanly see first image. However sometimes things go wrong see second image and the can is lifted at an angle, which can result in the can being placed in front of the pedestal, rather on than on it. An alternative to the half-wheel lifting apparatus is this two-arm claw with two large earphone-like soft lifting pads.
This would probably be less complicated to build than the half-wheel lifters, and seems to work well, judging by the images above. This is another Robot that successfully uses two pads - however in this case the pads are at the rear rather than the front of the Robot, and the edges of the pads rather than the pad faces are used to lift the can. This Arduino-based wooden-framed Rescue Robot handled much of the course quite well, but had some problems on a few of the obstacles.
So the how to build a nxt robot claw to move the stop loss to wherever we want even the strategy is running would be great. This is a video of the old version of the trade bot, check out the new version at the link above. MyBitcoins gadget bitstamp vs BTC e Oret: 3 6 05 51 1 618 Yliro: Sat, 03 Feb 2018 What is Bitcoin trading at now; Auto binary signals autotrader uk.
GitHub is where people build software. There's good verification processes and you supply a fair range of proof, though I doubt the company would be brazen enough to refuse to return your money and keep it, but it's frustrating it can't just do what it says on the tin and let you trade after you have been verified.