August 1 2012 nxt robot
Integration is simply the act of adding an infinite series of values over time. First of all, imagaine that the robot is perfectly balanced and exactly at the desired target position. At the end of the long beep, let go.

You can control it like you would a tank. If the robot was leaning forward, then the sensors would be closer to the floor so the RCX could tell that it was leaning forward. September 11, at 9:
I suggest that you take the NXC version that is also available from this blog post and convert it to RobotC. September 20, at You can leave a responseor trackback from your own site. October 9, at 8: The robot should now steer toward the edge of the line.
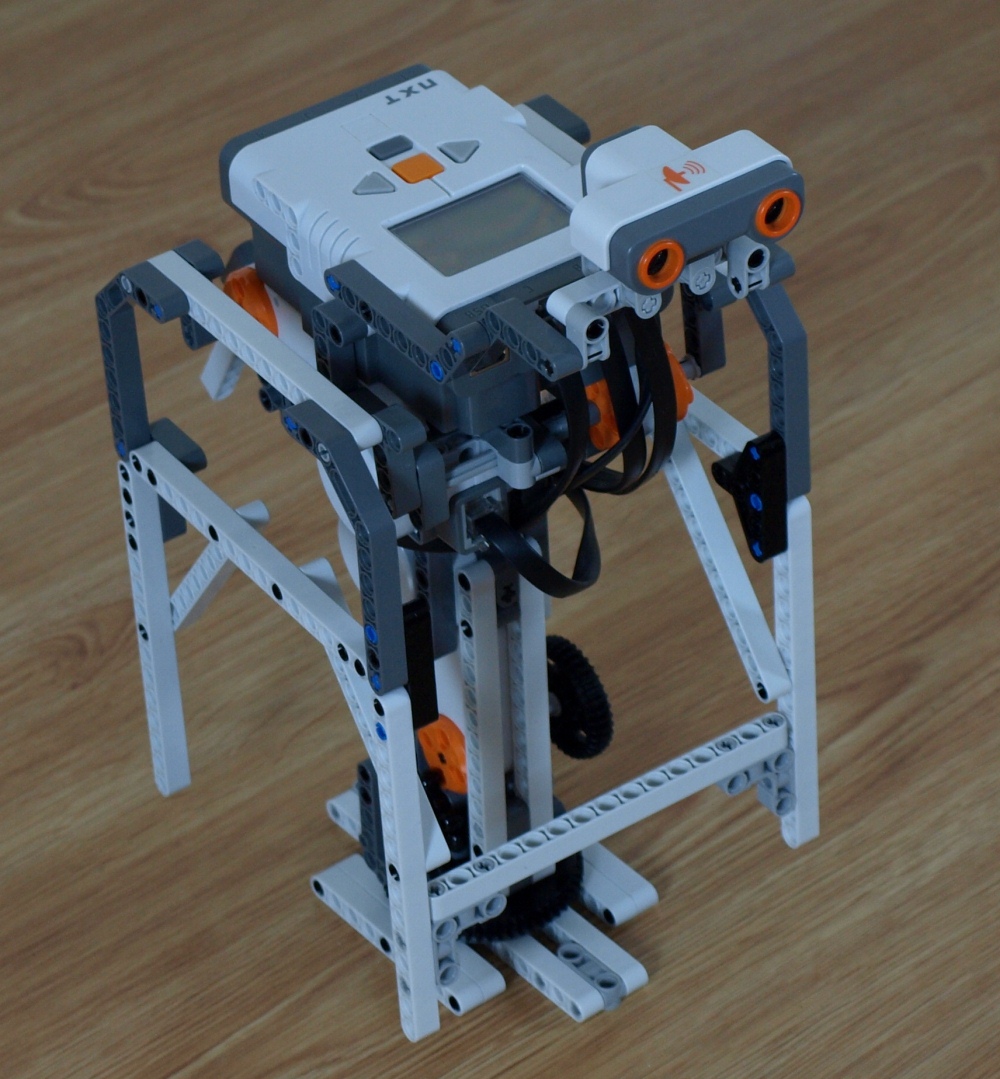
Ryo Watanabe did august 1 2012 nxt robot excellent job of explaining both the physics of the problem and the linear equation that makes a solution possible on the NXT. Well, even if you are really good when you let go of the robot, this may not be true. The reason it works is because the two terms have reached an equilibrium where one offsets the other. Mail will not be published required.

October 8, at The problem with the EOPD sensor is that it will be sensitive to the nature of the surface that it is running on. This entry was posted on Friday, June 11th, at 4:

But this august 1 2012 nxt robot will just be the initial gyro offset. If the robot is in the middle of driving forwards, then first of all you need at least enough power to maintain the speed, and thus the balance, and then you even need a little more to get the robot to lean backwards to make it slow down. You can use the acceleration sensor along with trig functions to get a tilt angle. The Accelerometer can measure tilt because gravity is perceived as acceleration but this only works if the sensor is not moving.

He calls his creation the AnyWay. When you run the program, the first thing it will do is let you select the wheel size that you are using. Leave a Reply Click here to cancel reply. To calculate the power these variables are multiplied by respective constants in a four term linear equation, the result being the power august 1 2012 nxt robot for the robot to stay balanced.
Before the robot starts to balance it gets an initial gyro offset by averaging samples of the sensor value while the robot is lying on the ground. Integration is simply the act of adding an infinite series of values over time. There are three options: This function also takes care of one more piece of housekeeping that we should discuss: