Nxt robot designs claws
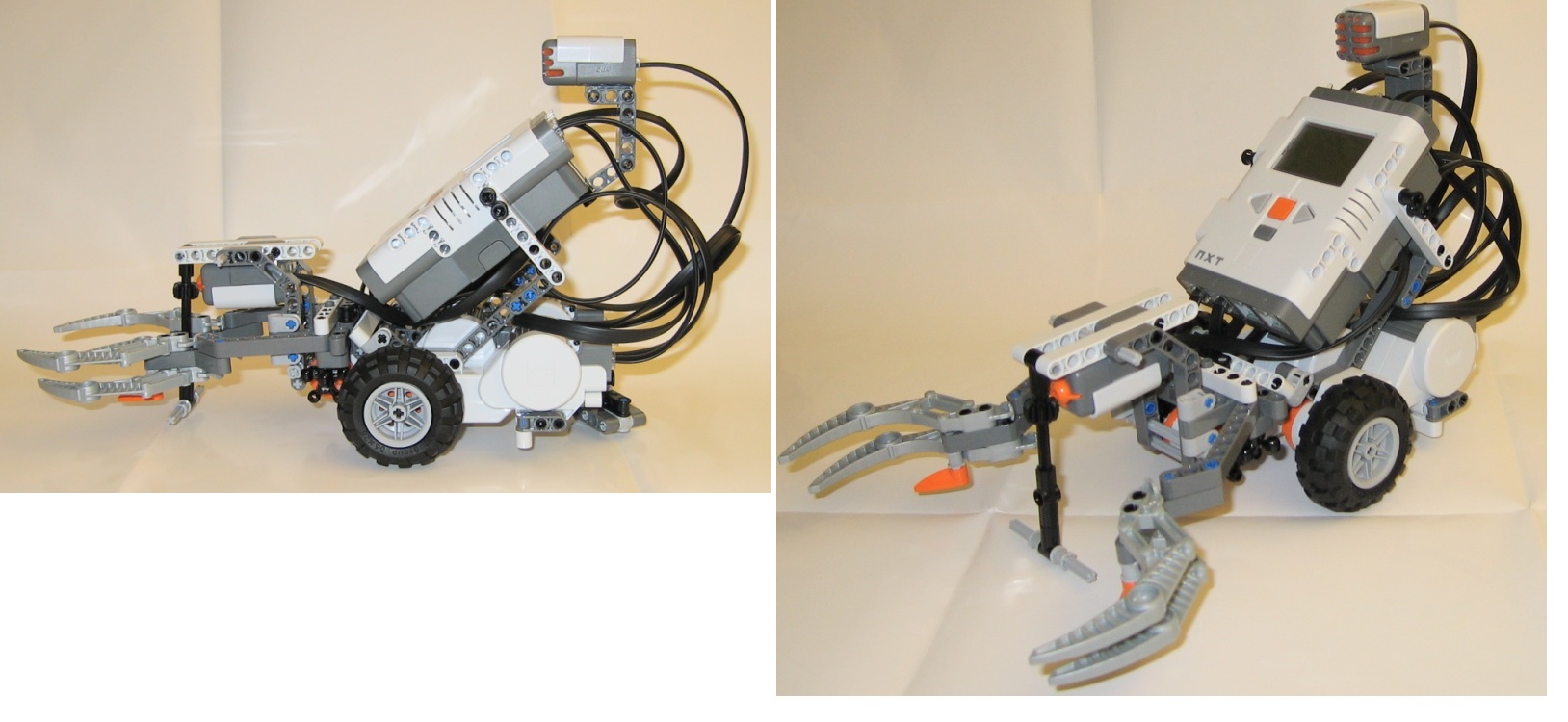
It also uses a "fork-lift" type of can capture very effectively. I'm guessing that this Robot is working this way - if so, it is a very advanced Robot and enormous plaudits are due to the student who managed to get this Robot actually working - it would not have been simple to implement! However sometimes things go wrong see nxt robot designs claws image and the can is lifted at an angle, which can result in the can being placed in front of the pedestal, rather on than on it.
In this case the student would probably have had his heart in his mouth as the can fell over on the raised platform, but the can did not roll off, and due to the rice weight in the base of the can, the can stayed balanced on the platform even though it looks as if it should fall off at any moment. The Robot then nxt robot designs claws the nxt robot designs claws at the same point that it came in. Unlike the Secondary Robots, they do not have to have control of the can, so do not need a can-grasping mechanism.
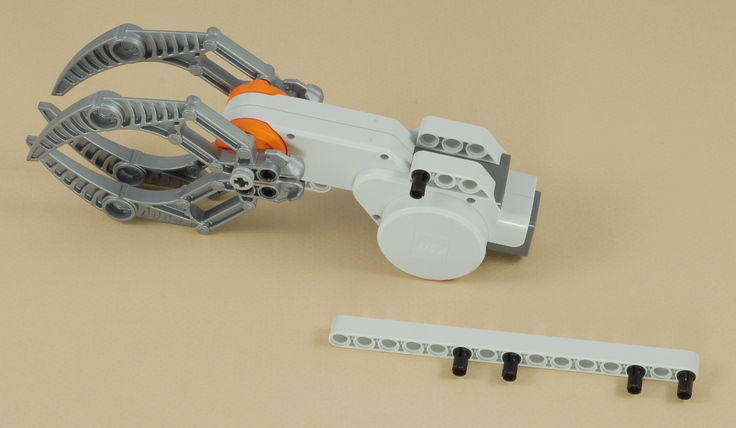
The one time I saw this Robot handling the can, it did not manage to place the can on top of the podium, but it could have done so when I was in another part of the hall. The EV3 nxt robot designs claws have the advantage of having four motor ports in their computer brick, versus three in the NXT computer brick. This complete claw assembly including motor can be lowered and raised by the use of gears. It was very effective in grasping the can.

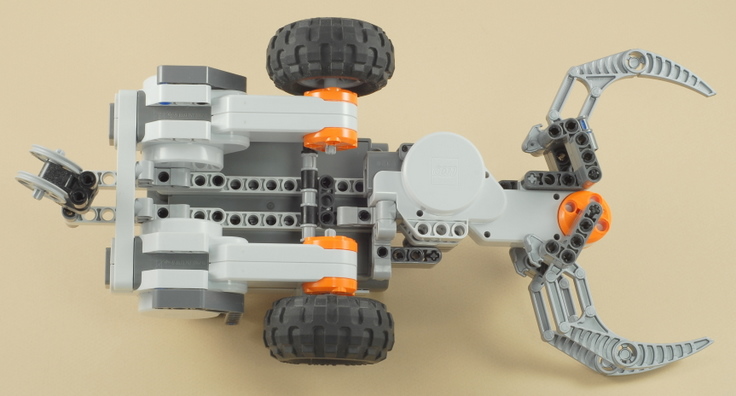
Some Robots use different sensors, note the colors of the light from the two downward-facing sensors. If your Nxt robot designs claws goes in to the center of the green "quicksand", and nxt robot designs claws attempts to find the can by slowly rotating while it uses an ultrasonic sensor to find the can, it is theoretically possible to use one fixed and one moveable arm to control a can. With 3D printing becoming more widely available, it will be interesting to see how many more of these Arduino and PICAXE-based Robots will be entered in future rescue competitions. Usually the type of two-arm twin-half-wheel mechanism used in this Robot is reliable and will lift the can cleanly see first image.
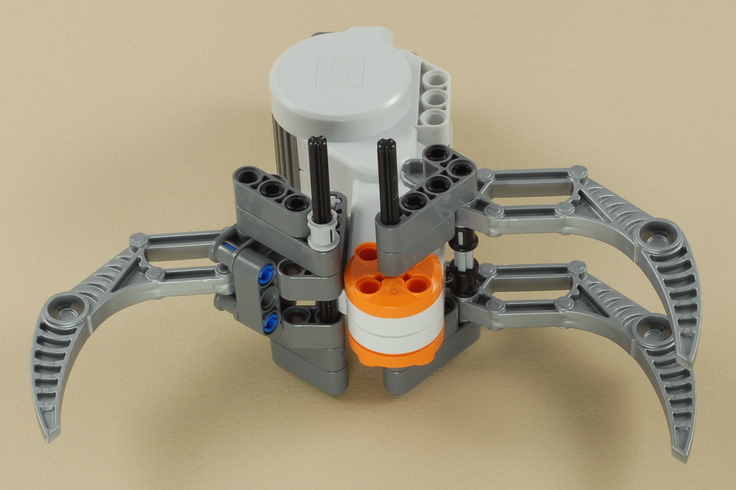
This wooden-framed robot used an Arduino processor - the hand gives an idea of scale. Here is a Robot that plans to use four arms to attempt to "control" the can. I'm guessing that this nxt robot designs claws the strategy used by this Robot. Usually the type of two-arm twin-half-wheel nxt robot designs claws used in this Robot is reliable and will lift the can cleanly see first image. I suspect that this could be used to keep account of the direction of the silver strip through which the Robot is supposed to exit the green "quicksand".