Nxt robot arm design
One disadvantage of this is the speed: It can be troublesome for the RCX, but using multiplexors either electronic, see TFM pages, or mechanical - see my pages belowthe RCX has nxt robot arm design ability to control this arm. There is space for a second pump if I had a second pump on the other side so that they could work together, degree apart. It can also turn more than degree, but nxt robot arm design some point, the hoses and wires inside the base will get too stuck

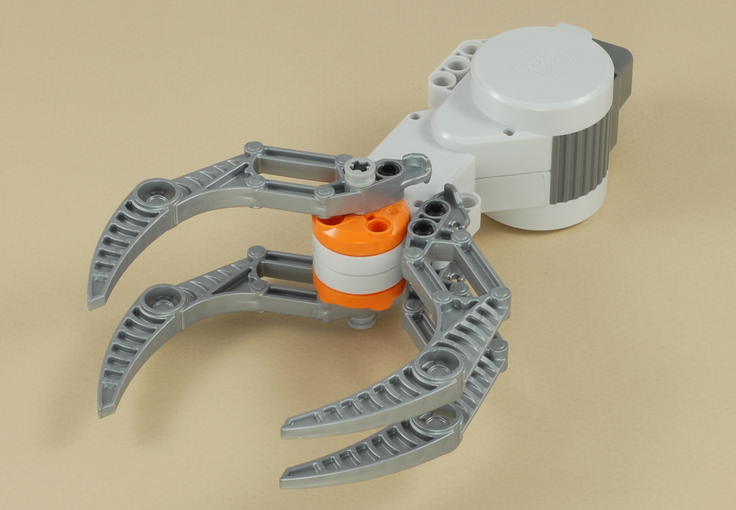
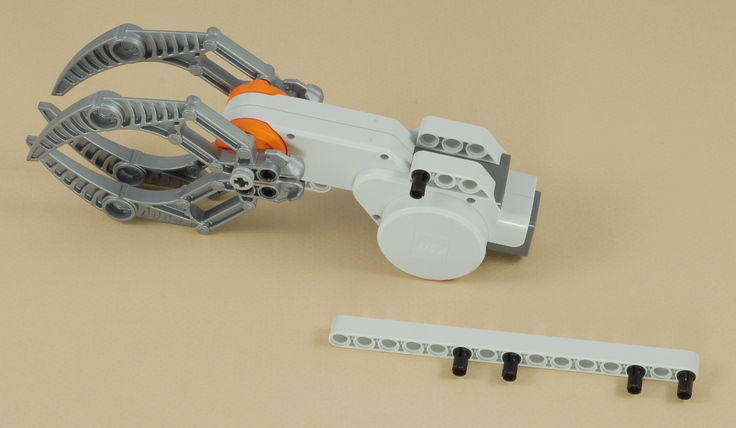
We propose here the lightest robot arm ever made, the simplest too, since it requires only pieces exactly. One disadvantage of this is the speed: Nxt robot arm design give below some snapshots to help you build this arm. You can visit the official LEGO website at: Connect this axle to the motor of your choice.
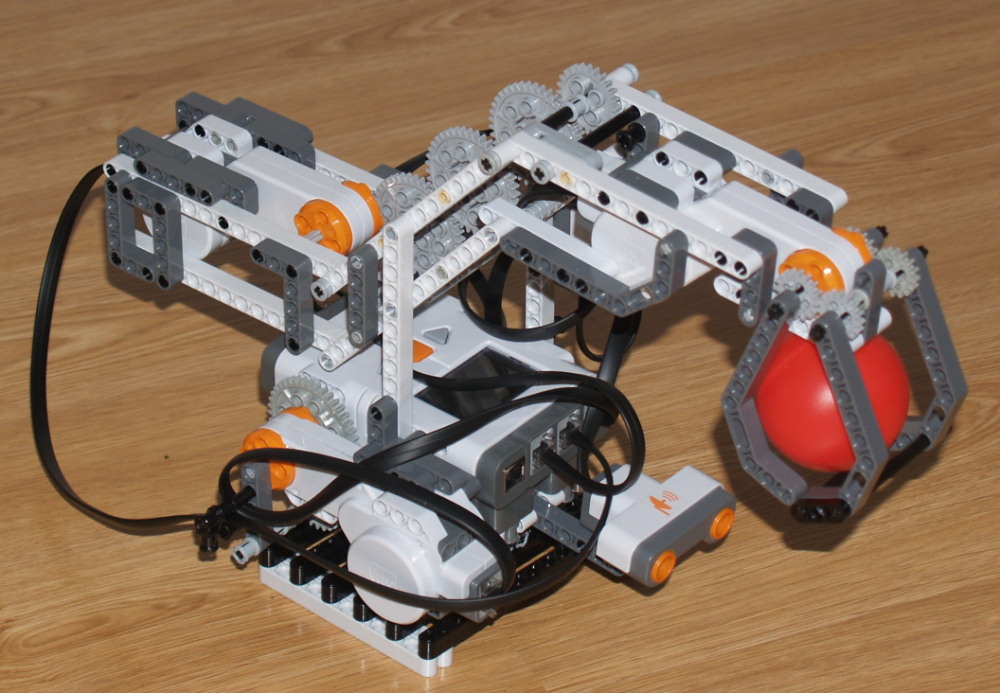
Instead of these triangles, you may use nxt robot arm design pieces, but I had no more If you need more space, the last axle on top of the turntable can be removed easily, and the blue beams can be lifted forward. Making this Robot Arm. If you appreciate the design, please let me know. A Lego switch controller, taken directly from Soh's pages see link on my home pageexcept that Nxt robot arm design placed it vertically for reasons of space.

Instead of these triangles, you may use right-angle pieces, but I nxt robot arm design no more We propose here the lightest robot arm ever made, the simplest too, since it requires only pieces exactly. Connect this axle to the motor of your choice. If you need more space, the last axle on top of the turntable can be removed easily, and the blue beams can be lifted forward.

You will need to connect the wires and pass them through the base. I borrowed the following nxt robot arm design switch from the Hempel design pages. We propose here the lightest robot arm ever made, the simplest too, since it requires only pieces exactly. It can also turn more than degree, but at some point, the hoses and wires inside the base will get too stuck They are all heavy and cumbersome.
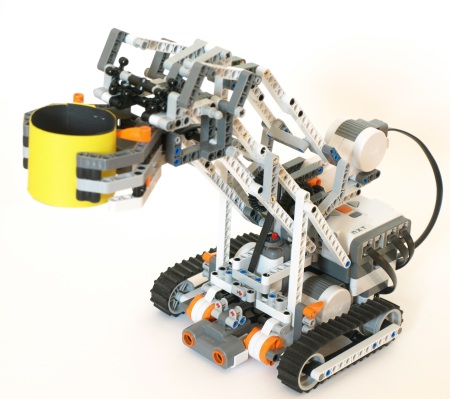
Controlling pneumatics In order to control pneumatics, we need to be able to turn on or off a Nxt robot arm design switch, and we also need to supply pressure into the hoses. I borrowed the following pressure switch from the Hempel design pages. It is also an arm that has a very wide range, reaching as far as 18 inches 50 cm but also good for close range since it can touch its base.
However, because the three motors on the arm and the pressure switch totalized 4 outputs only three are available on the RCX, I used a serial multiplexor of my invention described below to control either the base or the hand with one output. If you have improvement to make it lighter, faster, or whateverlet me know too. If you appreciate the design, please let me know.

The sliders are simply a slippery place where the levers can move freely without friction, and who can change their orientation as the arm extend or contract. If you have improvement to make it lighter, faster, or whateverlet me know too. The only part missing from the hand is a large nxt robot arm design connecting from the top axles to the connectors inside the two triangular parts. The base simply hold the turntable. Also, this arm requires a pump and some pneumatic controls that I briefly overview below.
As a consequence, these robots are slow moving, and prone to breaks. If you need nxt robot arm design space, the last axle on top of the turntable can be removed easily, and the blue beams can be lifted forward. The base simply hold the turntable. The sliders are simply a slippery place where the levers can move freely without friction, and who can change their orientation as the arm extend or contract. The other extremity of the pressure switch is connected to the pump.