Lego mindstorms nxt balancing robot

I would like to thank Laurens Valk and Xander Soldaat who helped me with this project. When these two values are multiplied by their respective constants in the balance equation, they will cancel each other out. This function also takes care of lego mindstorms nxt balancing robot more piece of housekeeping that we should discuss:

You will need to experiment on the best placement. October 1, at 8: October 9, at

Hello, I have the same problem as that of roboxboy. September 19, at 8: October 4, at I found several models, in state space representation, but those models output is the torch not the speed and the input is velocity, acceleration of wheel, angular velocity, angular acceleration of pendulum and not the position, velocity of the wheel and angle, angular velocity of the pendulum.
Lego mindstorms nxt balancing robot the robot is in the middle of falling forward, then this value will be positive. October 1, at 8: You will also need to make the NXC compiler target the 2. I suggest you start with a very slow drive speed so you can work out the proper steering code to make the robot stay on the line. Here is the overview.

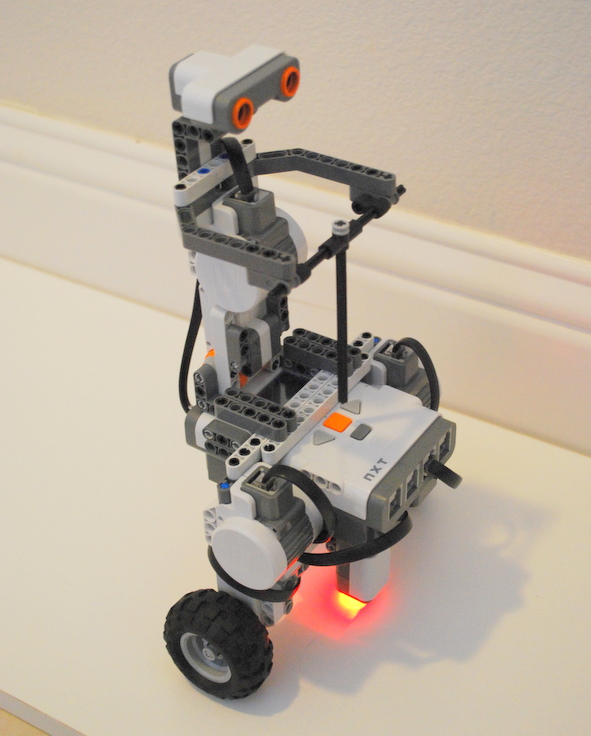
Here is the overview. If you want to use other sensors, such as the Ultrasonic or Light sensor, in addition to the Gyro sensor that is essential for balancing, you can do that. November 13, at

Since bigger wheels move further, given a certain amount of input, you need less of it to achieve the same amount of lego mindstorms nxt balancing robot. I suggest that you do some simple experiments to determine the center of mass. It will also not handle slopes since being balanced requires a different angle to the surface when you are on a slope.

First of all, imagaine that the robot is perfectly balanced and exactly at the desired target position. The robot should balance and stay in place if you remove this code. Here is the direct link to the download: Are you getting an error?

And actually not that hard to understand. But I think, taht your programm has a bug! Could you send me this program? November 13, at That may do the trick.

Since the long lego mindstorms nxt balancing robot average of the angular velocity, assuming the robot is balancing, should be zero, the long term average of the sensor value can be used as the gyro offset. Thank you for your help. Integration If you are a young robot builder, you have probably never heard of integration.